

Towards the generalizing the pneumatic-based augmented haptics palpation training simulator.
- Aishwari Talhan, Ph.D.

- Oct 19, 2019
- 2 min read
Updated: Oct 22, 2019
Abstract: Augmented haptics enables us to experience in enhanced reality with high fidelity via combining the real and virtual environment. The numerous applications of this technology are medical, telemedicine, entertainment, telerobotics, education. Palpation is the most preliminary procedure used to perceive, diagnose, and treat physical problems by a physician. We have analyzed the two different categories of palpation procedure, such as: passive and active. In passive palpation, the physician palpates localized abnormalities which previously occurred at the location, for example, tumor, and lumpy tissue conditions. Whereas, in active (dynamic) palpation, it takes place in the real-time perception, such as pulse and heartbeats.
In the previous work, we have demonstrated augmented haptic prostate palpation (DRE) simulator using pneumatic actuation. In this paper, we intend to extend our work towards the generalizing the approach for palpation training simulator using augmented haptics and pneumatic. The complete system consists of original electro-pneumatic hardware, various silicone-made actuators, body mannequins, and supportive library of related abnormalities of multiple body parts and organs. In a video demonstration, we will show active and passive feedback scenarios related to three types of palpation training simulators. For example, 1) prostate palpation, 2) thyroid gland (neck), and 3) pulse (see Fig. below).

After the successful attempt of pneumatic operated AH based DRE palpation training simulator, we attempted to generalize this methodology for a complete palpation training simulator. Note that we have used programmable pneumatic actuation and particle jamming techniques to create the scenarios that vary from normal condition to diverse abnormal conditions into our specialized designed silicone-made end-effector. At this end, we designed and developed a neck (thyroid) palpation training simulator.
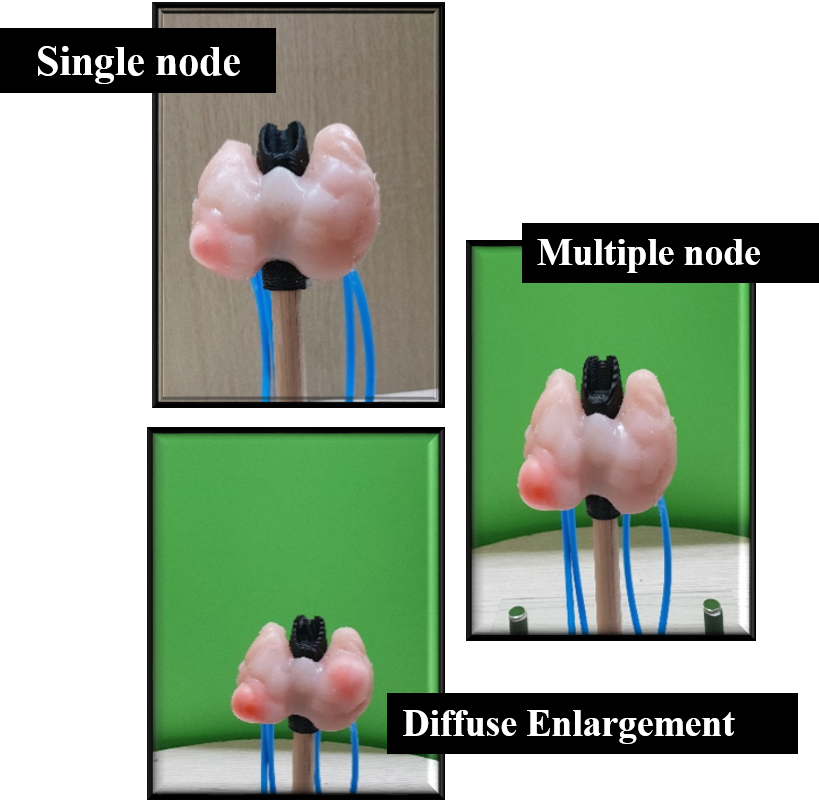
Our designed and developed silicone-made thyroid glad (end-effector) was able to create a single stage to multiple node inflammation within a single end-effector.

Now, to represent active palpation feedback, we designed and developed a pulse training palpation simulator.

Note that in this prototype, we used only pneumatic actuation to inflate and deflate the end-effector to follow the pulse profiles. Particle jamming is not needed.
Follow the work in one single video given below. This work we have demonstrated in AsiaHaptics 2018.


Comments